Guys….we’re in the throws of rotation. And at least one of my poor students has calculus immediately preceding AP Physics C. I feel so bad for her. The day we started she had made up a calc quiz, came to day 1 of rotational inertia, then went to calculus. Oh did I feel her pain.
Arguably the most difficult part of deriving rotational inertia is the visualization of how to go about the integration. I mean, let’s be honest, once we find how to express dm the integration is always an easy one.
Part of the problem is getting students to understand what it means to say things like dm, dV, dA, etc. They understand the definition linguistically, but it’s really hard to think of it practically. Tell them that dr^2 is zero and their minds are blown and bothered.
Day 1 of cylinders did not go well. Arguably, in part, because we were short on time. But also because the what why how was overwhelming.
I remembered a demo someone had shown where they 3D printed their objects to roll down the incline. They had actually made nesting cylinders, which then served as a great way to discuss integration.
I’m trying to think of a way to visualize each of the d-steps of the cylinder integration for my students with materials I have on hand. As I’m digging through the closet I notice the slinky coil. It’s nearly perfect!!!
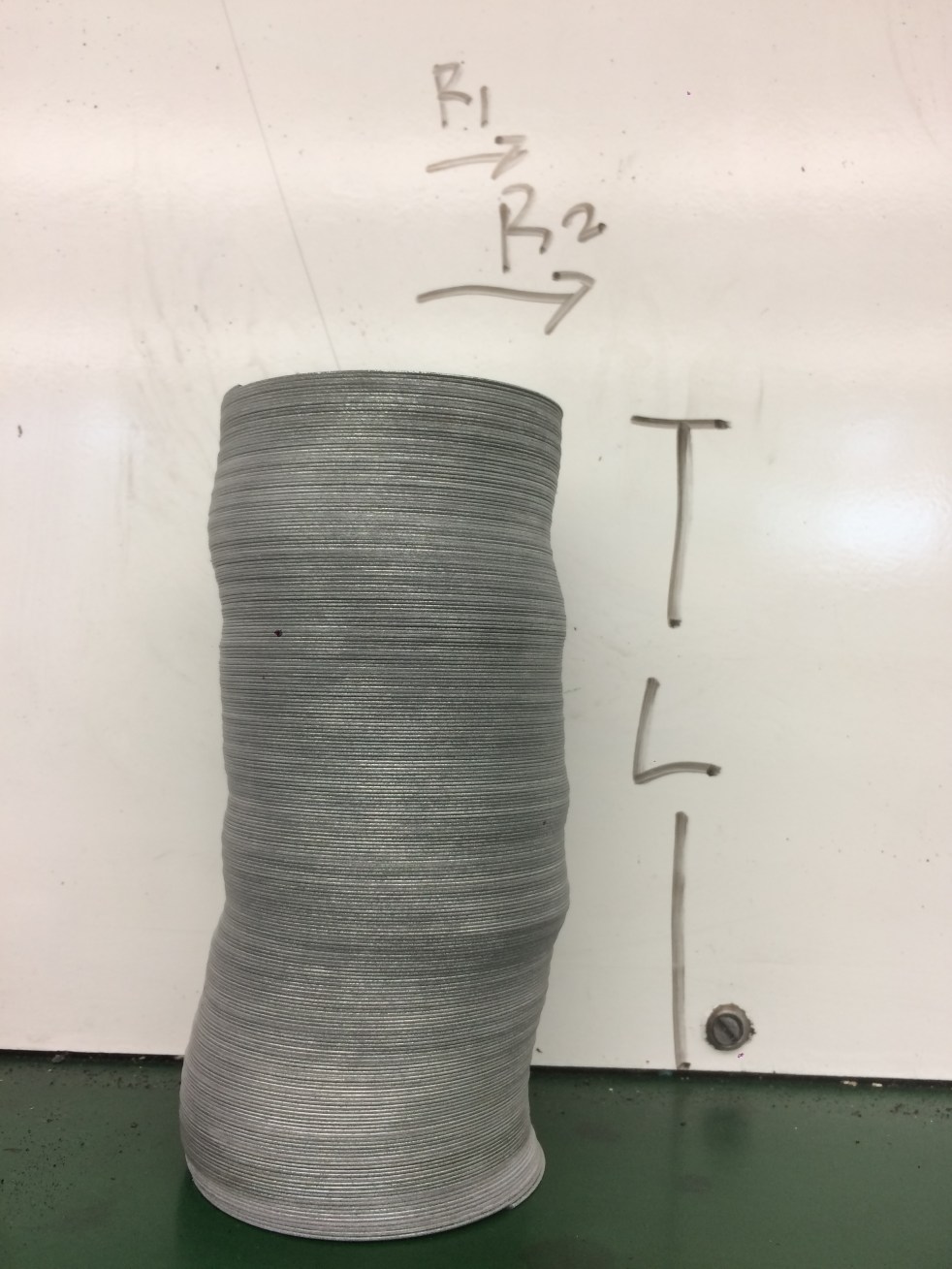
Ideally, I wish I had one with nice thick coils so we could take about the cylinder with R1 and R2, but this will suffice for the most challenging part.
So imagine you have a cylinder of length L, and inner radius R1 and outer radius R2 and would like to determine the moment of inertia about its center…
First, as always let’s define rho, but we have to find dm in terms of r. So how do we do that?
Well, let’s take some horizontal slices, where each slice is dm… now we can see that dm = rho*dV…but wait… what is dV?


Well, if we make those slices infinitely small…is there really a volume left?

Ah! so dV is really dA, and we are looking at it across the length of the slinky, so dm = dA*L!
Conveniently, I know that A=pi*r^2, so dA = 2*pi*r dr
And the rest is substitution!
